Página Inicial > Produtos > Robô Colaborativo > Robô de Laboratório HelenX > Robô colaborativo móvel HelenX-MR6

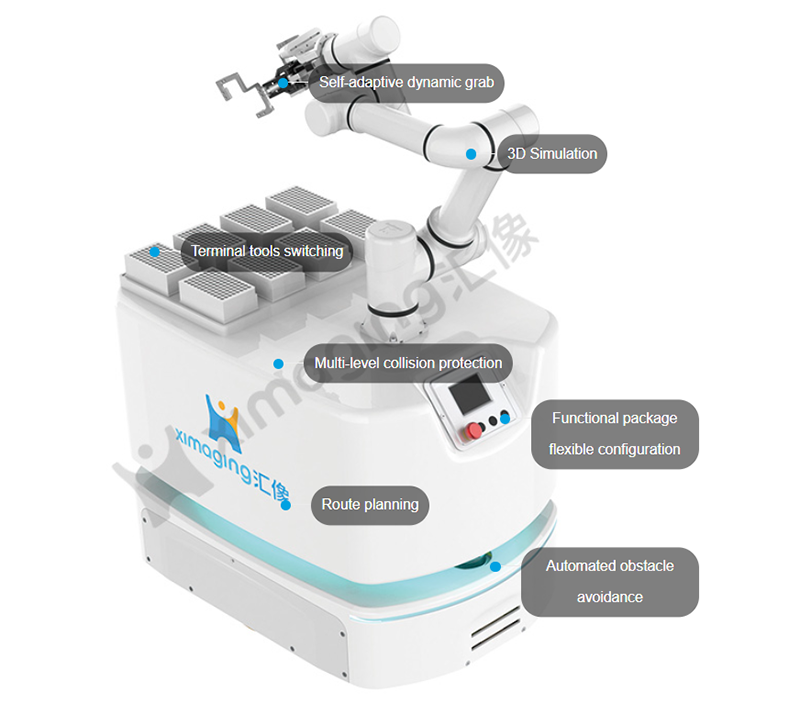
O robô móvel composto, desenvolvido pela XImaging, é composto por AMR e robô colaborativo. Tecnologia avançada de navegação a laser dupla, instalada com diferentes sensores e sistemas de visão, permite a identificação do ambiente para evitar qualquer obstáculo no caminho, sempre seguindo rotas eficazes para alcançar o destino dos experimentos.
Satisfatória eficiência de trabalho e consistência, o robô substitui completamente operações manuais repetitivas, complexas e entediantes. Amostras carregadas por meio de suportes de alta taxa de throughput, permitindo operação não assistida por longos períodos. Oferecemos duas séries: Robô Colaborativo Fixo e Robô Colaborativo Móvel (Trilho, AGV), para diferentes aplicações experimentais com base nas suas necessidades de espaço, carga e cenários.
| Dimensão | 800*600*700mm |
| Peso | 120kg |
| Navegação | SLAM de duplo radar a laser |
| Método de Acionamento | diferencial de dupla roda |
| Carga terminal | 3kg |
| Carga da plataforma | 150kg |
| Precisão de posicionamento integrada | +/-0.5mm |
| Carga da plataforma | 150kg |
| Velocidade máxima de navegação | 1.4m/s |
| Capacidade da bateria | 48v/35Ah |
| Resistência abrangente | 10h |
| Ambiente de trabalho | 90% de umidade relativa (não condensada); 0-50℃ |
| Método de Carregamento | Automático, troca de bateria, manual |
Espaço limitado
A navegação a laser permite que robôs móveis trafeguem por espaços relativamente pequenos.
Equipamento fora de ordem
Assim que os pontos forem implantados corretamente, os robôs móveis poderão encontrar o equipamento necessário facilmente.
Difícil de modificar
Os robôs móveis basicamente não exigem modificação do seu local de trabalho atual.
Transferência entre andares
Capaz de interagir com elevadores, portas automáticas e janelas de transferência para transferência de amostras.
Área Limpa Não Acompanhada
Após esterilizado, os robôs móveis podem trabalhar de forma independente na área limpa, com controle remoto.
Ambiente Perigoso
O ambiente perigoso para cenários de aplicação bioquímica não colocará os robôs móveis em risco.
SISTEMA DE OPERAÇÃO CIENTÍFICA INTELIGENTE
O design de interface gráfica permite aos usuários criar métodos experimentais facilmente por arrastar e soltar. Inicie-os com apenas um clique, simples e amigável ao usuário. Funções poderosas, permitindo controle preciso de cada posição do robô. Ele suporta plataforma cruzada e múltiplos terminais, como PCs, tablets e telefones celulares.


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)