Hōmupeーji > 製品 > 協働ロボット > ラボロボット ヘレナX > 移動式協働ロボット HelenX-MR6

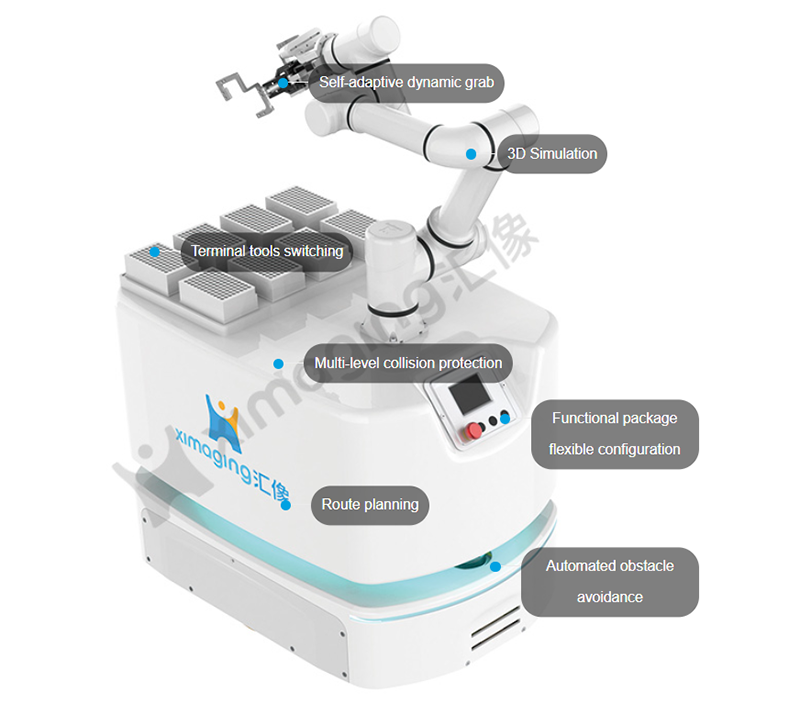
XImagingによって開発された複合モバイルロボットは、AMR(自律移動ロボット)と協働ロボットで構成されています。高度な二重レーザーナビゲーション技術を採用し、さまざまなセンサーやビジョンシステムを搭載することで、周囲の識別を行い、ルート上の障害物を回避し、実験のために常に効率的なルートで目的地に到達します。
満足のいく作業効率と一貫性で、ロボットが繰り返し、複雑で退屈な手動操作を完全に置き換えます。サンプルは高スループットラックを通じてロードされ、長時間の無人運転が可能です。私たちは2つのシリーズをご提供します:固定協働ロボットと移動協働ロボット(レール、AGV)、スペース、負荷、シナリオに基づく異なる実験アプリケーション用にです。
| 寸法 | 800*600*700mm |
| 重量 | 120kg |
| 航海 | デュアルレーザーレーダーSLAM |
| 駆動方法 | 二輪差動 |
| 終端負荷 | 3kg |
| プラットフォーム負荷 | 150kg |
| 統合位置精度 | +/-0.5mm |
| プラットフォーム負荷 | 150kg |
| 最大ナビゲーション速度 | 1.4m/s |
| バッテリー容量 | 48v/35Ah |
| 総合耐久性 | 10時 |
| 労働環境 | 90%相対湿度(結露しない);0-50℃ |
| 充電方法 | 自動、バッテリー交換、手動 |
限られた空間
レーザーナビゲーションにより、モバイルロボットは比較的小さな空間を通過できます。
設備の混乱
ポイントが適切に配置されれば、モバイルロボットは必要な設備を簡単に見つけられます。
変更が難しい
モバイルロボットは基本的に現在の作業現場を改造する必要がありません。
階間移動
エレベーター、自動ドア、サンプル移送用の転送窓と対話可能な能力があります。
無人クリーンエリア
滅菌後、モバイルロボットはリモート制御でクリーンエリア内で独立して作業できます。
危険環境
バイオ化学的な応用シナリオにおける危険な環境でも、モバイルロボットにはリスクが伴いません。
SMART SCIENTIFIC OPERATION SYSTEM
グラフィカルインターフェースのデザインにより、ユーザーはドラッグアンドドロップで簡単に実験方法を作成できます。ワンクリックで開始でき、シンプルでユーザーフレンドリーです。強力な機能を備え、ロボットのすべての位置を正確に制御できます。クロスプラットフォームとマルチデバイスに対応しており、PC、タブレット、スマートフォンなどでの使用が可能です。


![auth_code[2].png](https://shopcdnpro.grainajz.com/category/397899/2549/62d2048fdf61adc5569f440a524f1791/auth_code%5B2%5D.png)